HOME > 電験2種2次 機械・制御 > 1995年(平成7年)
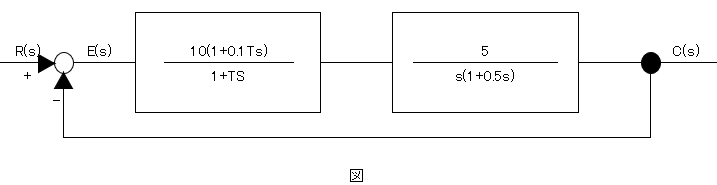
図のようなフィードバック制御系において、この系が安定であるための補償回路の時定数の範囲を求めます。
【解答と解説】
フィードバック制御系
\[\frac{出力C}{入力R}=\frac{G}{1+GH}\]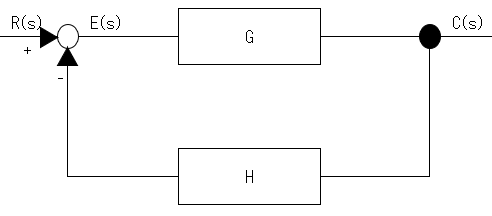
開ループ伝達関数
\[GH=\frac{10(1+0.1Ts)}{1+Ts}・\frac{5}{s(1+0.5s)}・1=\frac{5Ts+50}{0.5Ts^3+(T+0.5)s^2+s}\]特性方程式
\[1+GH=0\] \[1+GH=1+\frac{5Ts+50}{0.5Ts^3+(T+0.5)s^2+s}=\frac{0.5Ts^3+(T+0.5)s^2+(5T+1)s+50}{0.5Ts^3+(T+0.5)s^2+s}=0\] \[0.5Ts^3+(T+0.5)s^2+(5T+1)s+50=0\]フルビッツの安定判別より、
\[a_0s^3+a_1s^2+a_2s+a_3=0\]において、すべての係数a0、a1、a2、a3が存在して、同符号であることから、
\[a_0=0.5T>0よりT>0\] \[a_1=T+0.5>0よりT>-0.5\] \[a_2=5T+1>0よりT>-0.2\] \[a_3=50>0\]フルビッツの行列式のすべての値⊿1、⊿2が正であることから、
\[⊿_1=a_1=T+0.5>0よりT>-0.5\] \[⊿_2=\begin{array}{|cc|} a_1 & a_3 \\ a_0 & a_2 \end{array} =\begin{array}{|cc|} T+0.5 & 50 \\ 0.5T & 5T+1 \end{array}=5T^2-21.5T+0.5>0\] \[T^2-4.3T+0.1>0\] \[(T-0.023)(T-4.277)>0\] \[T>0.023かつT>4.277であるには、T>4.277\]もしくは、
\[T<0.023かつT<4.277であるには、T<0.024\]
補償回路の時定数Tの範囲は
\[0<T<0.024またはT>4.277\]